Das Drehen der Kuppel mit elektrischen Antrieben
Für den automatischen Betrieb des Teleskops über das Netzwerk vom Arbeitszimmer aus, ist eigentlich alles bestens eingerichtet. Da kann der Frost und die dann meist klare, ruhige Luft die Sternwarte besetzen. Das Positionieren, d.h. das Anfahren einer gewünschten Himmelsregion durch die Teleskopnachführung, das Fotografieren mit der CCD-Kamera und das Downloaden der aktuellen Bilder läuft.
Wäre da nicht das Probrem, den manuell zu drehenden Kuppelspalt, der Beobachtungsrichtung nachzuführen. Nach 1 1/2 Stunden gefolgter Erdrotation schaut das Teleskop dann auf die Innenwand der Kuppel, die nachgedreht werden muß.
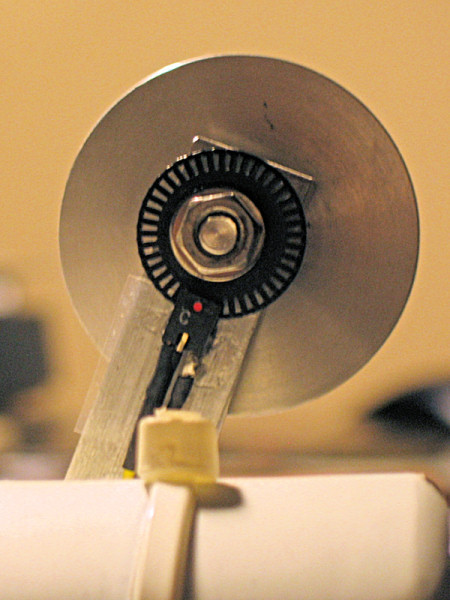
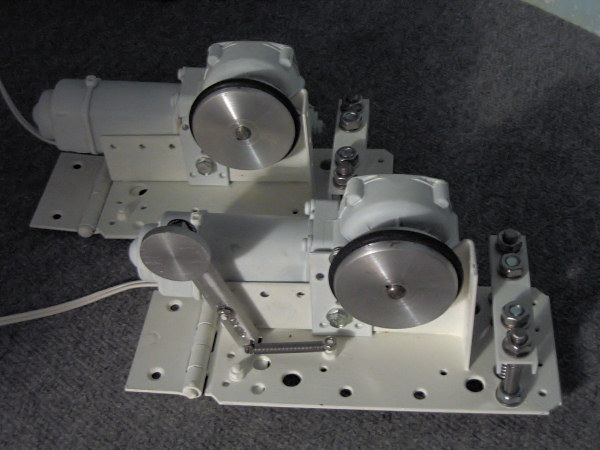
Zwei Getriebemotoren mit Reibrad, die den Kuppelkranz andrehen und eine kleine Motorsteuerung mit Ethernet-Schnittstelle vollendet. Erste Tests mit der Kraftübertragung Reibrad→Kuppelkranz sind erfolgreich verlaufen. Die aktuelle Position ermittelt ein am Kuppelkranz abwälzendes Rad (aus einer alten PC-Maus) mit Lichtschranke. Die Positionierung erfolgt ein Grad genau.


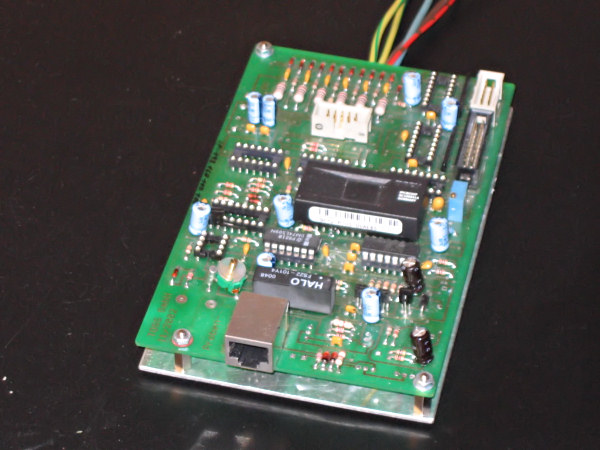
Als Programmiersprache verwende ich 'C'. Die Steuerinformationen werden als FTP-Protokoll über das LAN verschickt,
dann fährt die Motorsteuerung die gewünschte Gradzahl an.


Zwei Federpakete drücken das Reibrad von unten an den drehbaren Kuppelkranz an.
